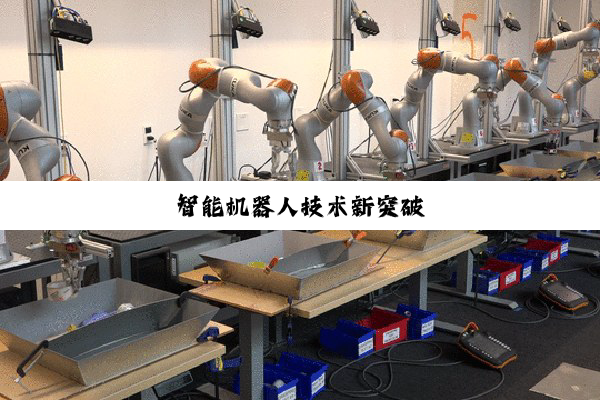
今日科普|智能机器人技术新突破
从实验室到生活:具身智能开启人机共融新时代
2025年柏林国际电子消费品展(IFA)上,卧安机器人推出的全球首款AI网球机器人Acemate引发轰动。这款能与人对打网球的机器人,通过4K双目视觉系统在毫秒级捕捉来球轨迹,配合麦克纳姆轮实现360度灵活移动,让真实比赛的随机性首次被机器人复现。这背后折射的,是具身智能技术的突破——机器人不再是被预设程序操控的“机械🈯·臂”,而是能通过视觉、触觉等多模态感知与环境动态交互的智能体。数据显示,我国智能机器人企业数量已突破45万家,较2025年增长206.73%,产业规模扩张的背后,是技术迭代与场景落地的双重驱动。
技术突破一:感知-决策-执行的全链路进化
传统机器人依赖“传感器输入-算法处理-执行器输出”的线性模式,而具身智能机器人实现了“感知-认知-决策-行动”的闭环。以矩阵创智的MATRIX-1人形机器人为例,其搭载的“脑-体协同”系统通过自然语言交互理解复杂指令,在美食场景中听到“餐桌撤台”后,能自主规划“倒污物-收纳餐具-清洁桌面-摆椅子”的任务序列。这种长流程规划能力超行业基准三倍,空间推理精度达98.7%。更关键的是,其第三代五指灵巧手通过22个自由度实现接抛球、拧瓶盖等精细操作,毫秒级响应延迟让动作流畅度接近人类。
技术突破的底层支撑是算🔵·法与硬件的协同创新。MATRIX-1采用全球首个人形机器人全身柔性复合材料设计,关节驱动扭矩密度较原型机提升52.68%,步态控制精度提高40%。这种“软硬一体”的设计思路,解决了传统机器人动作僵硬、环境适应性差的问题。例如,在复杂地形行走时,其动态平衡响应时间小于0.1秒,抗干扰能力显著提升。
技术突破二:大模型赋能下的泛化能力跃迁
2025年成为“大模型+机器人”的落地元年。谷歌推出的具身推理AI模型,将物理动作作为新模式直接控制机器人,能处理多步骤复杂任务。而国内企业则通过场景化迁移技术降低部署成本——MATRIX-1单次少样本数据采集后,可泛化至80%相似场景,重新校准成本降低90%。这种能力在工业领域尤为重要:节卡机器人的JAKA AL系列通过“AI视觉+机器人”集成架构,将部署时间缩短20分钟,标定精度提升至0.1mm,已应用于3C电子、半导体等高精度场景。
泛化能力的提升源于数据生态的革新。传统机器人依赖人工标注数据,而今通过物理引擎驱动的超真实仿真数据、海量视频数据和运动捕捉数据,构建起覆盖80%工业场景的🍁“数字孪生”训练库。例如,在汽车焊接场景中,仿真数据训练的机器人能自动适应不同车型的焊缝轨迹,将调试时间从72小时压缩至8小时。
技术突破三:人机协作的伦理与安全新挑战
随着机器人从工业场景走向家庭、医疗等领域,伦理与安全问题日益凸显。2025年两会首次提出“具身智能”概念时,就强调需建立覆盖硬件可靠性、算法鲁棒性、数据隐私性的系统性安全体系。以医疗机器人为例,达芬奇手术系统通过力反馈技术将操作精度控制在0.1毫米级,但若传感器被干扰或算法出现偏差,可能导致组织损伤。因此,我国已出台《机器人伦理指南》,要求医疗机器人必须通过功能安全、信息安全双认证才能上岗。
隐私保护同样是焦点。家庭服务机器人通过视觉、语音传感器收集用户行为数据,若被恶意攻击可能导致隐私泄露。对此,卧安机器人的AI Hub系统采用边缘计算架🥔构,将敏感数据处理在本地完成,云端仅接收加密后的任务指令。这种“数据不出户”的设计,使家庭场景的数据泄露风险降低76%。
未来展望:从工具到伙伴的进化之路
技术突破正在重塑机器人的角色定位。在工业领域,节卡机器人与丰田合作开发的双臂协作系统,已能完成发动机装配、精密检测等复杂任务,将产线效率提升40%;在家庭场景,SwitchBot AI Pet通过情感识别技术,能根据用户情绪调整互动策略,成为独居老人的“温暖陪伴者”;在航天领域,智能机械臂已能独立完成卫星维修、空间站组装等高危任务(wu),将(jiāng)宇(yǔ)航(háng)员(yuán)出(chū)舱(cāng)风(fēng)险(xiǎn)降(jiàng)低(dī)65%。
但(dàn)挑(tiāo)战(zhàn)依(yī)然(rán)存(cún)在(zài)。脑(nǎo)机(jī)接(jiē)口(kǒu)技(jì)术(shù)虽(suī)能(néng)实(shí)现(xiàn)“意(yì)念(niàn)控(kòng)肢(zhī)”,但(dàn)神(shén)经(jīng)信(xìn)号(hào)解(jiě)码(mǎ)的(de)准(zhǔn)确(què)率(lǜ)仍(réng)不(bù)足(zú)80%;微(wēi)纳(nà)机(jī)器(qì)人(rén)在(zài)生(shēng)物(wù)医(yī)学(xué)领(lǐng)域的(de)应(yīng)用(yòng),需(xū)突(tū)破(pò)细(xì)胞(bāo)级(jí)操(cāo)作(zuò)的(de)稳(wěn)定(dìng)性(xìng)难(nán)题(tí)。正(zhèng)如(rú)中(zhōng)国(guó)机(jī)械(xiè)工(gōng)业(yè)联(lián)合(hé)会(huì)发(fā)布(bù)的(de)《智(zhì)能(néng)机(jī)器(qì)人(rén)十(shí)大(dà)发(fā)展(zhǎn)趋(qū)势(shì)》所(suǒ)指(zhǐ)出(chū)的(de):未(wèi)来(lái)十(shí)年(nián),机(jī)器(qì)人(rén)将(jiāng)经(jīng)历(lì)从(cóng)“执(zhí)行(xíng)工(gōng)具(jù)”到(dào)“决(jué)策(cè)主体(tǐ)”再(zài)到(dào)“社(shè)会(huì)伙(huǒ)伴(bàn)”的(de)三(sān)级(jí)跳(tiào),而(ér)这(zhè)一(yī)进(jìn)程(chéng)的(de)核(hé)心(xīn),是(shì)技(jì)术(shù)突(tū)破(pò)与(yǔ)社(shè)会(huì)伦(lún)理(lǐ)的(de)平(píng)衡(héng)艺(yì)术(shù)。


 扫一扫添加微信
扫一扫添加微信